Zasoby stają się z roku na rok coraz
bardziej naglącym problemem dla szpitali w całej Europie, podczas gdy
starzejąca się populacja i coraz wyższe oczekiwania zwiększają popyt na
usługi opieki zdrowotnej. Technologia jest jednym ze sposobów, który
może nam dać nadzieję na dokonanie niemożliwego - podniesienie jakości
opieki chirurgicznej przy utrzymaniu dostępności tych usług dla
pacjentów.
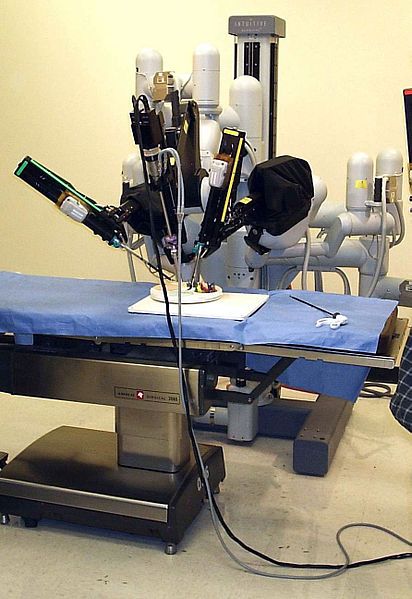
W tym kontekście inwestowanie w chirurgię robotyczną staje się coraz
silniejszym trendem w badaniach UE. W niedługim czasie badacze
spodziewają się wprowadzić na rynek technologie do automatycznych
interwencji chirurgicznych, a nawet ramiona robotyczne do
przeprowadzania takich zabiegów pod nadzorem chirurga, który może
znajdować się w miejscu oddalonym o tysiące kilometrów. Wszystko to
brzmi niezwykle ekscytująco, niemniej nadal pozostaje wiele do
zrobienia, zanim tego typu technologie trafią do najbliższego szpitala.
Paolo Fiorini, naukowiec pracujący niegdyś dla NASA, poświęcił ponad
20 lat na niwelowanie różnic między instytucjami badawczymi oraz na
działania na rzecz komercjalizacji nowo opracowanych technologii. Celem
jego najnowszego projektu - EUROSURGE - jest stworzenie paneuropejskiej
społeczności badaczy, uproszczenie opracowywania oprogramowania i
stworzenie platformy online, która będzie wyrazicielem głosu naukowców z
tego sektora.
W wywiadzie dla magazynu research*eu nt. wyników dr Fiorini
przedstawia trudności, z jakimi borykają się obecnie naukowcy unijni i
swoje nadzieje związane z przyszłością tej obiecującej dziedziny badań
naukowych.
Jakie są główne cele EUROSURGE?
EUROSURGE to działanie koordynacyjne (CA), którego zadanie polega na
zbudowaniu społeczności laboratoriów badawczych i przedsiębiorstw
działających aktywnie w dziedzinie chirurgii wspomaganej robotycznie -
określanej często mianem chirurgii robotycznej. Pracując na rzecz
budowania społeczności, uznałem że to również dobra okazja na podjęcie
kwestii związanych z „robotyką kognitywną”, która była
jednym z głównych punktów zainteresowania robotyki w 7PR.
Na czym polega nowość lub innowacyjność projektu i jego podejścia do tego tematu?
Przy okazji budowania społeczności badaczy pomyślałem, że konieczne
jest opracowanie metod zapewniających im możliwość współpracy, być może
za pośrednictwem wspólnej platformy sprzętowej/programistycznej. Mimo iż
w budżecie CA nie ma środków na opracowywanie platform sprzętowych,
zajęliśmy się wieloma problemami powiązanymi z celami projektu.
Zaczęliśmy od przeprowadzenia wywiadu na temat tego, kto się czym
zajmuje w Europie w dziedzinie chirurgii robotycznej. W ten sposób
powstała mapa, która łączy wszystkie ośrodki prowadzące badania w
dziedzinie chirurgii robotycznej i określa ich główny temat badawczy.
Mapa już jest wykorzystywana przez interesariuszy do wyszukiwania
partnerów i recenzentów projektów europejskich.
Kolejnym krokiem było przygotowanie technologii, która uprościłaby
opracowywanie oprogramowania na potrzeby chirurgii robotycznej. Nacisk
położony został na modułowość, aby różne grupy mogły dopisywać
komponenty kompatybilne z oprogramowaniem opracowanym w innych
laboratoriach. Zasugerowaliśmy wytyczne zarówno w zakresie
projektowania, jak i wdrażania pakietów oprogramowania.
Aby spełnić ścisłe wymagania stawiane przed urządzeniami medycznymi,
całe oprogramowanie musi przejść rygorystyczną walidację i testy
referencyjne. Zgodnie z naszą wizją projekt powinien opierać się na
ontologii, to znaczy na formalnym opisie funkcji i powiązań komponentów
systemu chirurgii robotycznej w połączeniu z opisem zadań wykonywanych
przez system. Natomiast wdrażanie powinno opierać się na komponentach
wraz ze specyfikacjami, które można automatycznie wywieść z opisu
ontologicznego. Oparliśmy nasze prace na pakietach ROS i OROCOS - dobrze
znanych i wykorzystywanych przez społeczność robotyczną - poszerzając
je o koncepcję „programu nadzorującego komponenty”,
dzięki któremu każdy pakiet oprogramowania może określać siebie i swoją
funkcję pośród innych komponentów i umożliwia sprawdzenie za pomocą
skryptu testowego kompatybilności wszystkich komponentów między sobą.
Ostatnim zagadnieniem poruszonym w ramach projektu EUROSURGE jest
analiza przeszkód innych niż techniczne, tj. kwestii związanych ze
wspólnym językiem, patentami, regulacjami, etyką i przepisami w różnych
krajach europejskich. Opracowaliśmy w związku z tym nową witrynę -
SurgiPedia - gdzie publikowane są białe księgi i stanowiska w sprawie
chirurgii robotycznej, wyposażając ją w specjalną wyszukiwarkę do
gromadzenia informacji o patentach powiązanych z chirurgią robotyczną.
Co skłoniło pana do podjęcia badań w tej dziedzinie?
W latach 1985-2000 pracowałem nad zdalnym sterowaniem do zastosowań
kosmicznych w Laboratorium Napędu Odrzutowego NASA w Pasadenie (CA-USA).
Po powrocie do Włoch w 2001 r. przekonałem się, że badania kosmiczne
nie cieszą się zbytnią popularnością i po kilku próbach podjęcia
współpracy z Włoską Agencją Kosmiczną postanowiłem wykorzystać swoją
wiedzę z zakresu zdalnego sterowania w chirurgii robotycznej. To był
doskonały pomysł, gdyż umożliwił mi udział w wielu projektach z tej
dziedziny, koordynowanie prac, opracowywanie nowych technologii i
szkolenie studentów. Założyłem także kilka spółek zajmujących się
technologiami na potrzeby chirurgii wspomaganej robotycznie.
Jakie były największe trudności, które napotkał pan w rozwoju chirurgii robotycznej?
Największe trudności nie wiążą się oczywiście z problemami
technicznymi. Główna przeszkoda to brak ciągłego strumienia środków,
który pozwoliłby osiągnąć odpowiedni poziom dojrzałości technologii.
Przykładem niech będzie jedna z moich spółek typu start-up. Po
osiągnięciu dobrych wyników w ramach europejskiego projektu ACCUROBAS,
postanowiłem wykorzystać zdobyte doświadczenie i zbudować nowego robota
chirurgicznego, który uporałby się z niektórymi z problemów wskazanych w
toku prac nad projektem. Byłem w stanie pozyskać znaczący kapitał
wysokiego ryzyka na potrzeby spółki, ale nie był on wystarczający, aby
dotrzeć na rynek. Udało się nam opracować nowy produkt, przeprowadzić
testy na zwierzętach i uzyskać certyfikację technologii. Wówczas jednak
skończyły się pieniądze i nie byliśmy w stanie znaleźć innych inwestorów
gotowych do współfinansowania prób klinicznych na ludziach. To problem,
z którym borykają się wszystkie europejskie projekty. Opracowujemy
świetne technologie, które pozostają bez wpływu na gospodarkę, gdyż
nigdy nie trafiają na rynek. Miejmy nadzieję, że ten problem zostanie
rozwiązany w ramach programu „Horyzont 2020”, aczkolwiek
nie ma łatwego rozwiązania, zważywszy na brak inwestycji w zakresie
finansowania ryzyka w Europie.
Drugi problem wiąże się z trudnościami ze znalezieniem chirurgów
zainteresowanych poważną współpracą nad projektem inżynieryjnym. Na
początku są pełni zapału, ale kiedy prosimy ich o poświęcenie czasu na
testowanie urządzeń, porady czy zaproponowanie nowych funkcji, znikają.
Domyślam się, że tracą zainteresowanie w toku procesu opracowywania
prototypu z powodu zbyt długiej drogi do praktycznego zastosowania.
W jaki sposób projekt EUROSURGE miałby okazać się w tym zakresie pomocny?
Jestem przekonany, że poza wymienionymi problemami, udało nam się z
powodzeniem stworzyć społeczność badaczy zajmujących się chirurgią
robotyczną. Nie chcę przez to powiedzieć, że każdy jest zaangażowany i
uczestniczy w działaniach projektowych, niemniej dotyczy to wielu
naukowców. Zorganizowaliśmy we wrześniu udane warsztaty w Weronie, w
których wzięło udział około 70 naukowców, a teraz mamy stoisko na
międzynarodowej wystawie robotów iREX w Tokio, gdzie zaprezentuję
odwiedzającym najważniejsze wyniki wszystkich programów UE poświęconych
technologii chirurgii robotycznej. Udało nam się w ten sposób
zaangażować w nasze działania nawet tych badaczy, którzy nie brali
udziału w projekcie EUROSURGE i nawiązać z nimi wszystkimi bardzo dobre
relacje.
W przyszłości mamy oczywiście nadzieję, że partnerzy będą
kontynuować prace nad warsztatami, witryną SurgiPedia wraz z
wyszukiwarką patentów, podejściami do projektowania i wdrażania
oprogramowania nawet po zakończeniu projektu. Wszyscy ufamy, że będziemy
w stanie zdobyć dofinansowanie UE na kolejny projekt i podtrzymać tę
inicjatywę.
Jakie są kolejne tematy waszych badań?
Kolejnym projektem z tej dziedziny, nad którym pracuję, jest
automatyzacja w chirurgii robotycznej. Nazwa projektu to I-SUR.
Pracujemy nad technologiami automatycznego wykonywania prostych
czynności chirurgicznych, takich jak nakłuwanie, cięcie i szycie. W tym
przypadku również zaledwie dotknęliśmy problemu i w kolejnym roku
będziemy starać się o pozyskanie środków na kontynuowanie badań.
Kolejny, zakończony niedawno, projekt SAFROS, wskazał na potrzebę
lepszych szkoleń z zakresu chirurgii robotycznej. Dlatego też
zawiązaliśmy nową spółkę w celu komercjalizacji oprogramowania XRON
(http//:metropolis.scienze.univr.it/xron), która może pomóc w obniżeniu
ryzyka wypadków w czasie zabiegów wspomaganych robotycznie. Wreszcie
najtrudniejszy cel to kontynuowanie prac nad opracowaniem robota
chirurgicznego, bowiem zapotrzebowanie na nowe produkty jest ogromne, a
na rynku nie ma ofert.
Source: Uniwersytet w Weronie
Referencje dokumentu: Na podstawie wywiadu z Paolo Fiorninim, koordynatorem projektu EUROSURGE